制御系設計,最適設計,バイオメカニクスに関する研究を行っています.
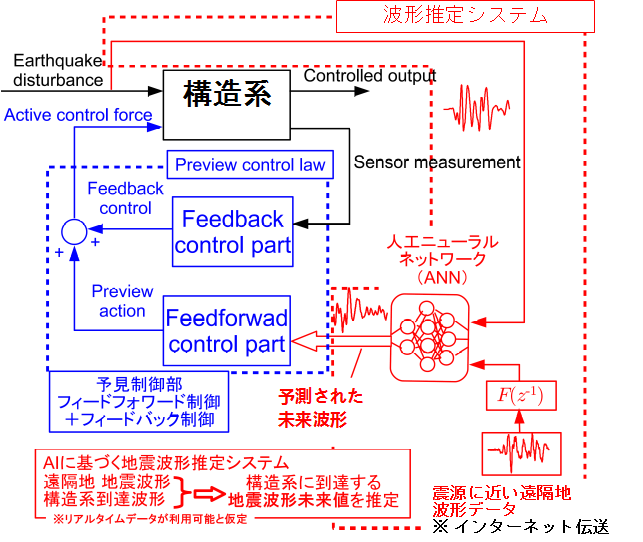
遠隔地地震波系データを用いた予見形振動制御系の設計
地震外乱を受ける構造系の振動制御系のさらなる性能向上のため,リアルタイム地震観測網(防災科学技術研究所 強震モニタ等)から得られる遠隔地波形配信データを用いて,制御される構造系に地震外乱が到達する前に地震の未来波形を予測し,先回りして制御する手法を研究しています.波形予測にはANN(人工ニューラルネットワーク)を用いていますが,他の推定法や制御系設計手法の導入によるさらなる制御性能の向上を目指しています.
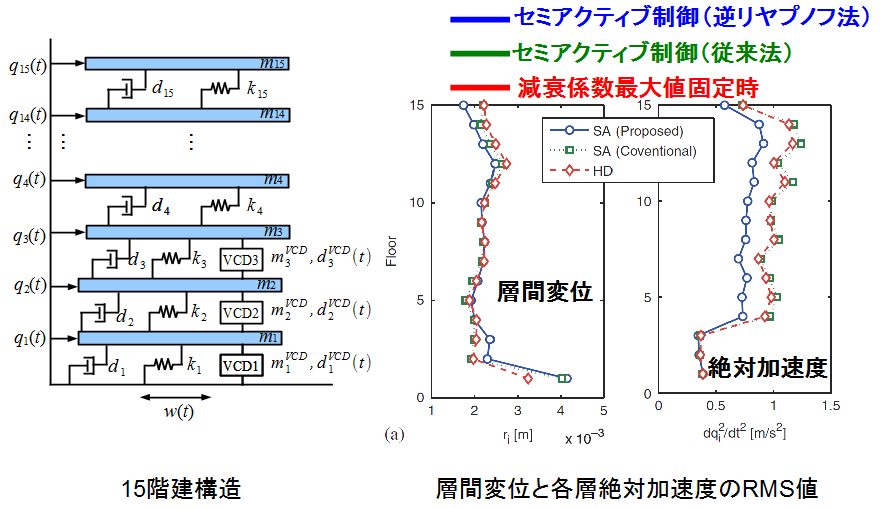
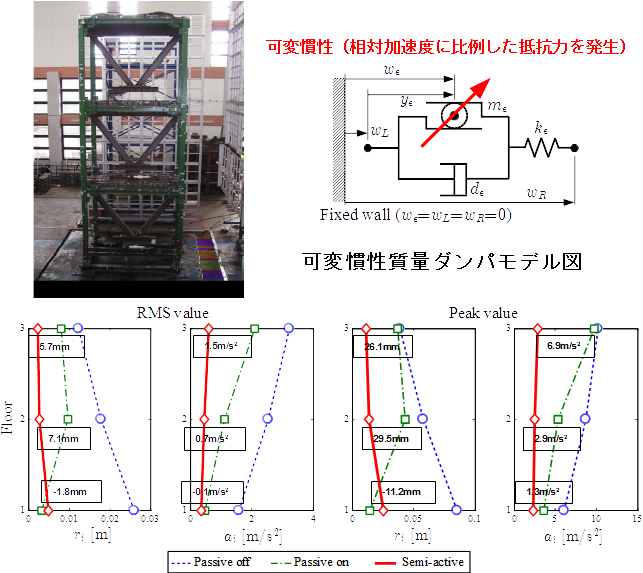
セミアクティブ振動制御系の設計
建築構造物や車両などに生ずる振動を抑制する手法の一つに,ダンパの減衰係数や慣性質量ダンパの質量係数等をリアルタイムに調整するセミアクティブ制御手法があります.本研究室では,従来行われているセミアクティブ振動制御を,制御理論や数値最適化手法の観点から見直し,より高い振動抑制性能を達成するための制御手法の開発を目指しています.
バイオメカニクス
小型ビデオカメラとヘッドマウント型小型モニタを組み合わせることによって,人に後方からの視覚情報を提示し,その情報と前方視野の情報の両者に基づく何らかのタスクを人に行わせる際,後方視野の導入がタスクに及ぼす影響について検討しています.
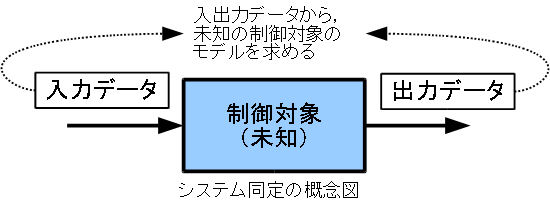
システム同定と制御系設計の融合に関する研究
振動系やロボットなどに代表される動的システムの数学モデルを求めることをシステム同定といいます.システム同定の手法として,今まで様々なものが提案されています.本研究では,従来制御系設計に多く用いられている数値最適化手法を用いたシステム同定手法を検討しています.
この方法を用いると,同定する物理パラメータが,固定値でなく時間の関数になる場合や,システム同定とコントローラ調整を同時に行うことが可能になり,現在研究を行なっています.
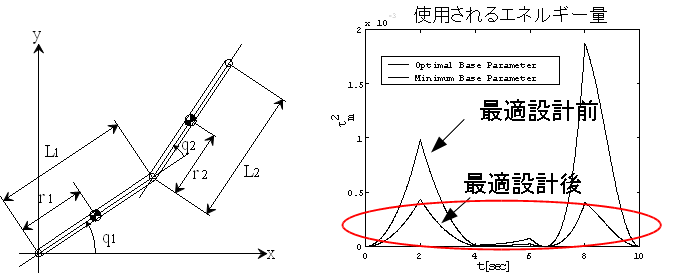
構造系と制御系の統合化設計
通常の制御系設計では,はじめに制御対象を設計した後,制御を行うコントローラを導出します(2段階設計).構造系と制御系の統合化設計では,制御対象と制御を行うコントローラを同時に設計することによって,2段階設計より高い性能を達成可能ですが,2段階設計よりも最適設計は困難になります.現在は,統合化設計のための数値最適手法の検討や,その応用について研究を行なっています.
下の例は,2リンクのロボットに対して統合化設計を行なった例ですが,統合化設計を行うことによって,同じタスクを行うためのエネルギー消費を大幅に小さくすることができています.